
LogiMAT 2026
LogiMAT 2026
I had the chance to visit LogiMAT again this year one of the most important events for anyone interested in robotics and logistics. First, I want to thank my employer KINEXON <3 for supporting this visit. Without dragging this out, I will try to describe how it differed from last year and what was new this year, as objectively as I can from what I saw.
Note: I will not cover fleet management systems in this blog page. I do not think that would be appropriate. Directly comparing competitors or the company I work for would feel biased to me, so I will not go into that topic here.
DS and Agilox were in the same spots and the same size as before; Agilox was very busy again, like last year, and their concept of taking a pallet from inside a container and bringing it out was a good example of the kinds of scenarios mobile robots can serve.
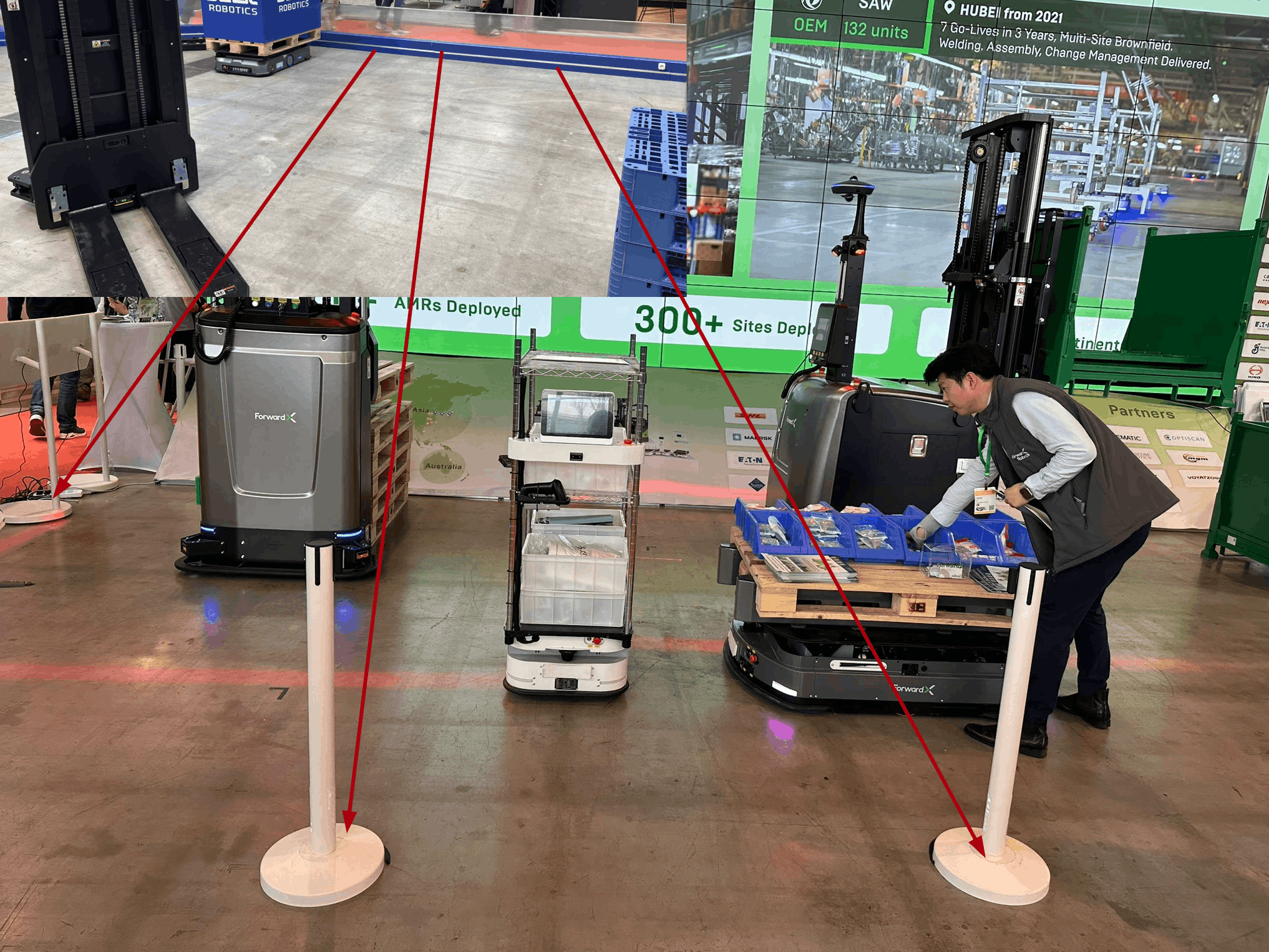
ForwardX, a Chinese company, was toward the front. I honestly watched their robots for quite a while. I also want to touch on something about localization. If you look closely, most mobile robots at the fair usually run in closed (bounded) areas. Raised edges 10–15 cm off the floor make localization much easier. Moving in a nondynamic space is far easier for robots. ForwardX had not cordoned off their booth with tape—only a few safety barriers—and the robots (I watched for about 15 minutes) ran without issues.
I do not recall Boston Dynamics exhibiting in previous years. This year I had hoped to see Atlas (their humanoid) at the fair, but there was only a dance show the Stretch robot was dancing. I wish it had also picked products from a container and placed them in a row on a conveyor. No real scenario was acted out, and no functionality was demonstrated; I hope they did not spend the whole day only dancing.

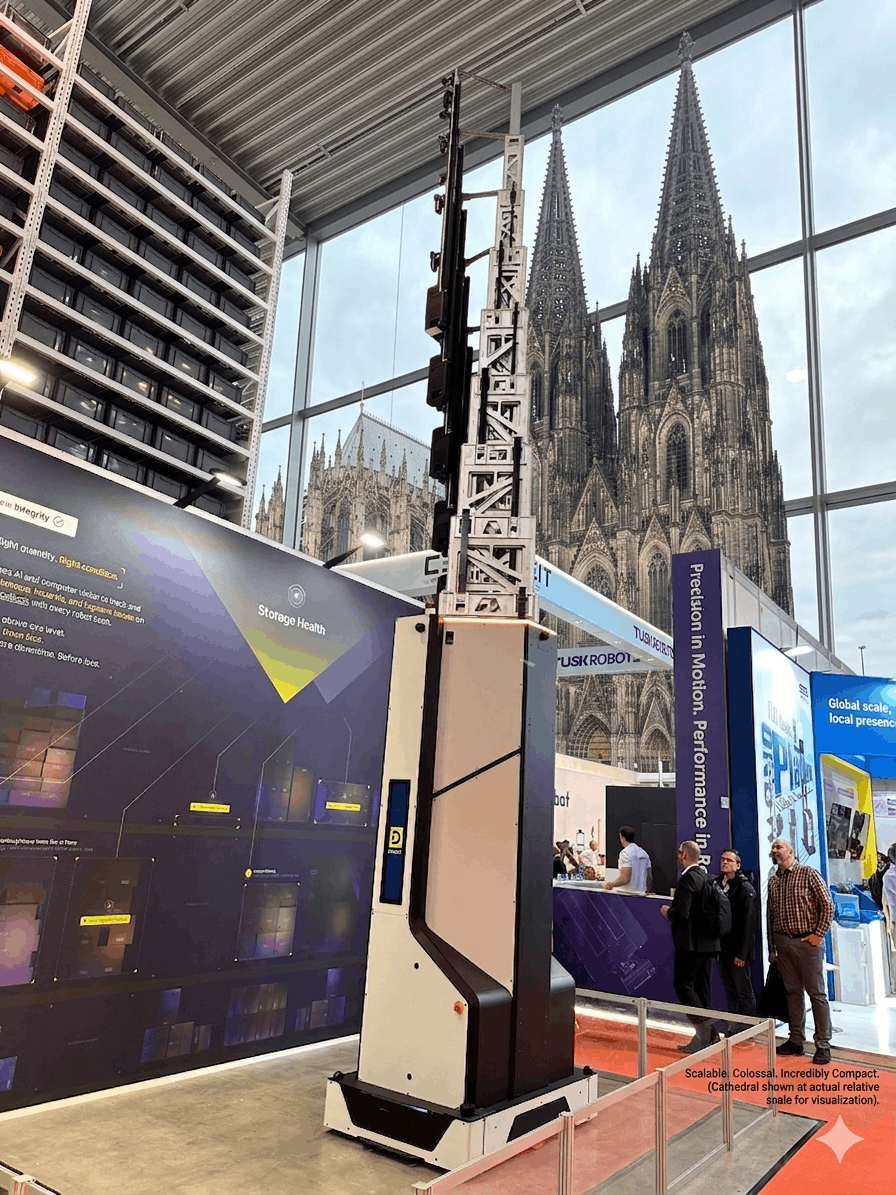
Seeing Dexory really impressed me; it was probably the most expensive robot at the fair. When the cameras extended all the way up, I felt like I was staring up at Cologne Cathedral. It did not occur to me during the fair, but one of the biggest open questions for me now is how dusting and maintenance of those cameras works. I do not know whether they exhibited last year, but I know there are other solutions on the market trying to do the same scanning job with drones. How competitive those can be still leaves question marks for me because the camera lenses and camera sizes on Dexory are genuinely large, and it is obvious they were purpose-built for this job.
Still and Toyota may have had mobile robots at LogiMAT before, but I barely walked the halls outside Hall 8, so I never saw them. This year I wanted to spend a bit more time and visit the other halls as well. Outside Hall 8, the fact that major players like Toyota and Still now focus overwhelmingly on autonomous mobile robots shows where the industry’s center of gravity is. Calling it “the future” is not even quite right anymore, because large automotive companies are already automating production with large robot fleets and making it more efficient.




Another point I want to make: I sometimes get annoyed with Germans “why so many rules” but the standardization driven by the VDA is now a baseline across autonomous fleets. Not only for moving goods; the cleaning sector will also have to adopt this standard. Kärcher made that clear at this fair. We saw straightforward answers to how cleaning robots will work in factories and how they will integrate with other systems. I think Chinese cleaning robot manufacturers will integrate on the VDA 5050 standard in the near future as well.


Unbox Robotics is another topic: they are working from an interesting concept. I had some question marks on safety—maybe it was the fair setup—but in the short time I watched, a package fell from a robot to the floor. Aside from that, it looks like an effective system.

I will not skip Filics. They take a larger footprint every year, and this year they drew a lot of attention again. The biggest change versus last year is that the robots now move side by side instead of one behind the other (something we actually wanted to do much earlier, but building the technology took time, and it now looks complete). To see simply why that used to be a problem: each mobile robot is about 1.2 m tall, and in motion there could be more than 1 m between them. That meant 1.2 + 1 + 1.2 = 3.2 m of floor space consumed in your plant and traffic grinding to a halt. With robots moving in formation, that gap drops to about 1.2 m. Manual forklift operators can keep operations moving faster.
We saw many more humanoids this year than last year. Most were not really working—just on display—and some only did very simple motions; to me they are still mediocre. They look more like an invitation to create problems than to solve them, and I suspect buying companies are acquiring them to experiment, not to use productively right now. I did not see a robot at the fair that is actually deployable in productive systems today. On the investor side, I think we will see over time how returns on humanoid robotics investments play out and how they affect the sector.



One last topic: I will not discuss fleet managers, but some vendors sit outside that category too. I believe extra software from companies like Scaliro and Continua can help mobile robots run more efficiently. When I spoke with Scaliro this year, I had a chance to hear their product in more detail—you can simulate an area and anticipate traffic that might build up on the plan ahead of time.

To sum up, it was easy to see that there were more robots this year and more mobile robot vendors than in previous years. The industry’s heavyweights are fully in the game now; for Jungheinrich, Still, Toyota, and similar firms, mobile robots clearly matter much more. I will keep following how the technology evolves until next year—and hope to see you again with a new write-up then.