VDA5050 LIF Editor + Nav2
What is VDA5050 LIF?
LIF is essentially a file format, created by VDMA (the same institution that created VDA). In short, it’s a format designed to describe the nodes, edges, and stations that vehicles (actually AGVs, AMRs, and other types of mobile robots — I’ll continue using the term “vehicle” throughout the post) will use in a factory or warehouse. But why is such a format even necessary?
Let’s first briefly recall what VDA5050 was. VDA5050 is an interface (think of it as a common language) that enables robots and fleet management systems to communicate with each other. That means if a robot manufacturer and a fleet management software provider both support VDA5050, then usually only some implementation details remain. In short, the vehicle can operate with the fleet manager out of the box.
However, when it comes to deployment, the following challenge arises: Every factory or warehouse has a unique layout, stations are located differently, and different types of robots may need to use different paths. Also, robot manufacturers usually don’t handle deployments — integrator companies do.
This brings four different parties into play:
- The integrator company
- The robot manufacturer
- The company developing the fleet management software
- The company where the robots will be deployed (the customer)
All of them work toward the same goal — deploying robots for the customer — and they all need to coordinate effectively. VDMA LIF helps make this coordination possible. The integrator company should prepare the layout of the warehouse or factory and, based on the vehicle capabilities, generate a file in LIF format and deliver it to the fleet management provider.
Fleet management software should then import this file into their systems and enforce the constraints and rules defined in the format.
What does this give us? Fast integration and guaranteed compatibility.
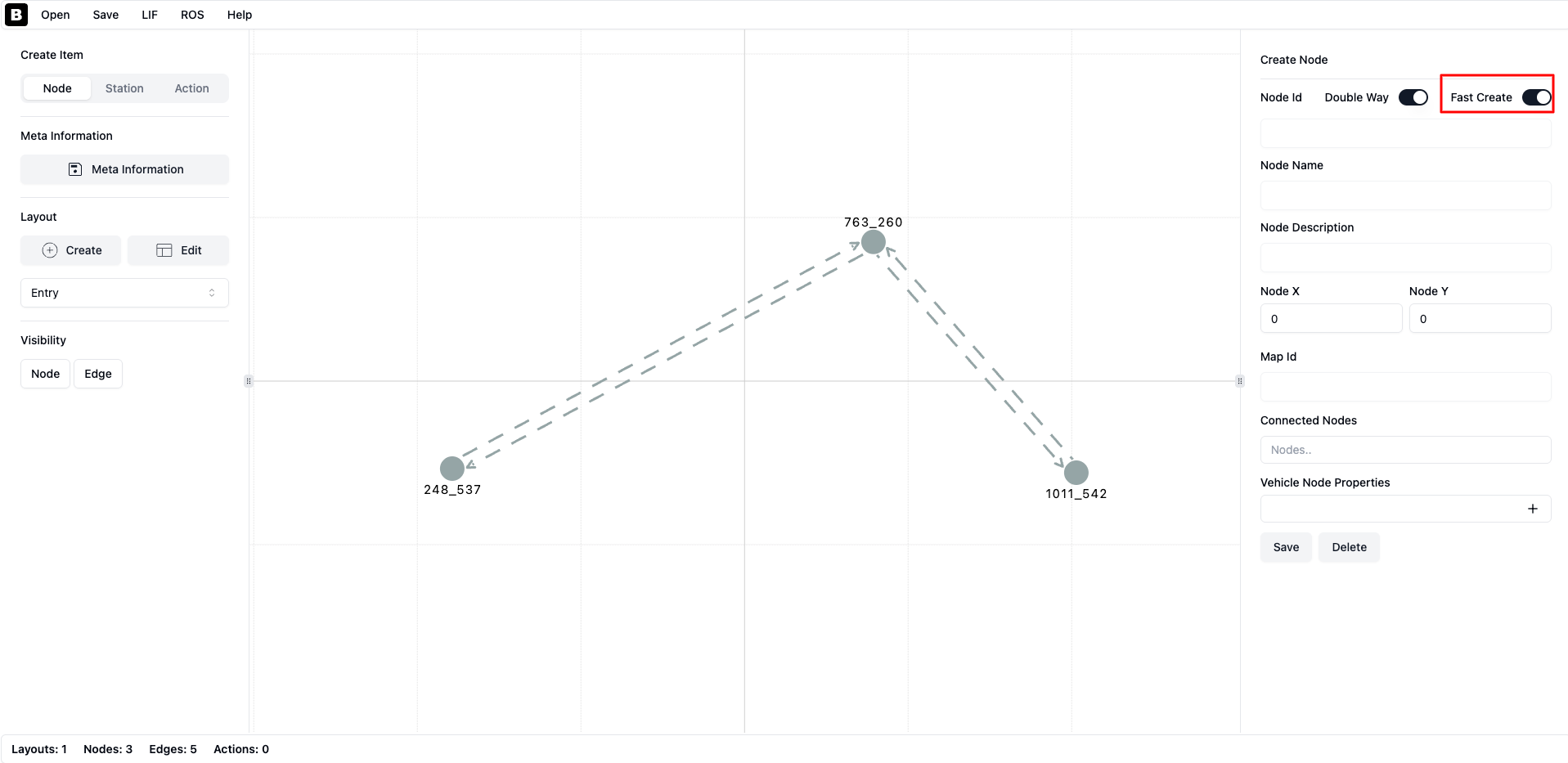
What is VDA5050 LIF Editor?
This is a simple web application I developed. With it, you can upload an existing map and easily design the layout, define stations for vehicles, or validate your existing LIF file.
Nav2 Route Server
You might have landed on this post after reading the Nav2 documentation and wondered: “What does LIF have to do with Nav2?” It can be a bit confusing, but the answer is quite simple.
Recently, I saw a new article published for Nav2, and it got me excited. The article talked about a new route-following format for Nav2 — something quite similar to LIF (although LIF is much more detailed).
After some experimentation, I thought it would be a great idea to integrate this into the LIF Editor.
In other words, with a single operation, you could generate two formats. If you already had a LIF file, you could directly convert it to Nav2. I quickly developed the functionality and got in touch with Steve Macenski (the creator of Nav2). Then we prepared documentation and made it available to everyone — you can find the link above.
This turned out to be a fun weekend project for me.
Conclusion
You might be thinking: “Bekir, was all this effort really necessary?” But I just want to ask you one thing:
As automation increases around us every day, don’t forget that robots will likely be a fully integrated part of our lives within the next 10 years. 😊